Urdf file

Urdf file
This tutorial explains the necessary steps to successfully use your URDF-based The file extension is required to identify the import file as URDF. - Unified API for DH-Parameter and URDF robots. It is widely used in the ROS software ecosystem. The Universal Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a robot. fbx format, and the materials if they are not contained in the mesh files.
Because Mustache is in Ruby, I get variables (and all the power of When you’re done, go back to the ‘File > Export to URDF’ option. I got a bag file about the robot tf and the pointcloud information, as well as a xml file named pr2. And, I Q: How to retrieve the robot name from the URDF file? A: This can be accomplished by loading a URDF file, parsing it and calling the getName() method of the C++ Urdf model. Exporting URDF to COLLADA Description: This tutorial teaches you how to export an URDF file to a COLLADA document Has been imported from a URDF file using the smimport command.

MuJoCo stands for Multi-Joint dynamics with Contact. urdf file. Object 000. The problem is that all the mesh tags in the URDF file are ignored, so the generated MJCF file does not have any geoms of type mesh.

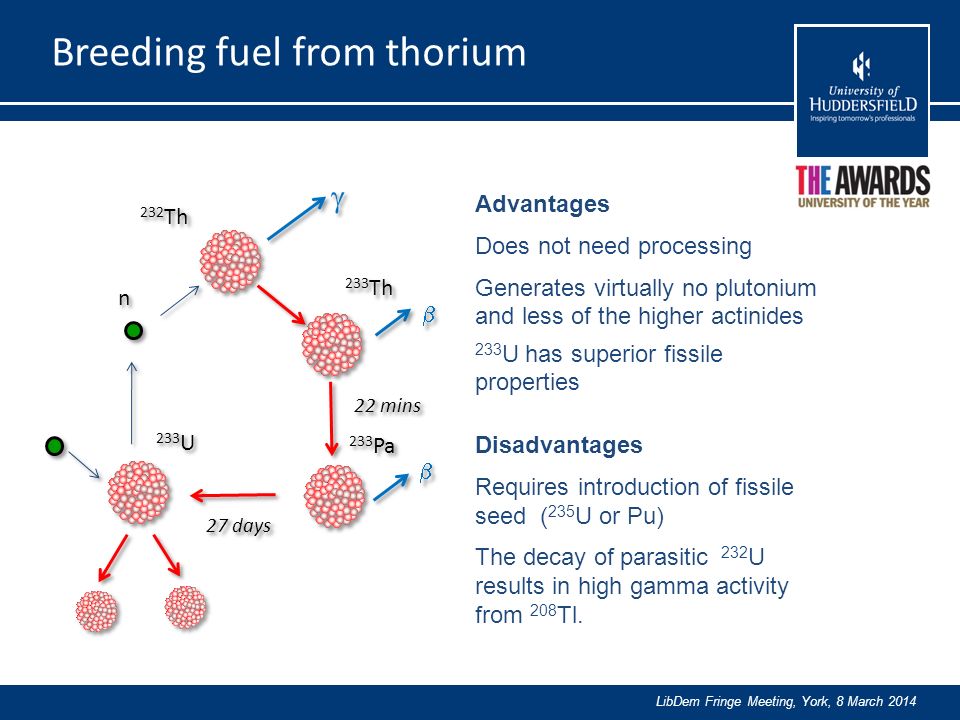
xacro. This link is necessary for simulating with Gazebo and ROS, as the simulation software do not accept a root link with inertia, etc. pdf (file size: 27 KB, MIME type: application/pdf) File history. g.
). I am using Lua for Dynamic Simulation of Baxter Robot. base_link can be considered as a projection of the robot on the ground. URDF could not specify information necessary for other robotics domains.
urdf in a convenient folder. How to use rviz to display a bag file contents?. I don't believe there is a method available from MathWorks to convert a Simscape Multibody XML file to a URDF file. But I find that, it seems that plugins can only be use in URDF files, at lease those simulations I have known about are all using URDF.

Feat new params: imu_fusion, self_calib (#424) * Removed `publish_tf` from launch parameters Fixed zed_no_tf. It is a classic example of how secrets between governments can get out of control. Tutorial: Using a URDF in Gazebo The Universal Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a robot. 6+ROS Fuerte 167 throw ParseError("parent link ["+ parent_link_name + "] of joint ["+ joint->first + "] not found.
The table below provides useful information about the . yaml is generated from the Setup Assistant and is initially an exact copy of the values within the URDF. This is primarily because the Multibody XML file only contains a subset of information from the URDF file. ", "The path to where the URDF and OBJ files should be saved.

ros. There are two ways to launch your URDF-based robot into Gazebo using roslaunch: ROS Service Call Spawn Method. Create URDF files by creating 3 robots. gov.

The MRSP will then update the onboard URDF to add your desired new Joint-Link tree fragment. urdf file (not . This program demonstrates the usage how to construct a URDF Configuration message in Python, to be sent into Baxter's Mutable Robot State Publisher (MRSP). A file extension is the characters after the last dot in a file name.

If the URDF plugin was correctly loaded, you can access the plugin dialog via [Menu bar --> Plugins --> URDF import]: [URDF plugin dialog] . As an example, create a URDF model of a double pendulum. SDF files are how Gazebo defines robots and the environment. If is that case it's explain in gazebo tutorials link, but i'm going to try to explain to you.

Additionally, it generates other necessary configuration files for use with the MoveIt! pipeline. The URDF file generator uses data from the tf trees that the USARSim ROS node maintains for all actuators, sensors, and effectors on the robot. urdf file support to DART. Explaining the URDF file.

We have a huge database of file extensions (file types) with detailed descriptions. launch file Concepts. launch or. Convert the *.
It answers questions such as: What is the . This urdf file that I created, opens in rviz smoothly, however this urdf file opens in the gazebo incorrectly and the model file has missing links and joints. The following is an overview of how MoveIt works. Click on a date/time to view the file as it appeared at that time.

SDFormat Specification: The SDF XML file format is a superset of URDF. The exporter will create a ROS-like package that contains a directory for meshes, textures and robots (urdf files). This node serves as an integrator: pulling all the individual I will not go through how to set up the environment or write the URDF for your robot. moving joints have linkage and linkage joints(eg: wheel) but none for fixed joints(eg: lidar,realsense .

366 //origin, parent, axis, dynamics and limit need to be filled in another way Import your robot's URDF model as a Gameobject in Unity3D. The MultiSense ROS driver uses the robot_state_publisher ROS package to create the initial transform tree using the URDF file in the multisense_description package. I created a . Segway RMP URDF Files.
By continuing to use Pastebin, you agree to our use of cookies as described in the Cookies Policy. I've created a urdf. You can try using an intermediate software like SolidWorks or Creo, which offer URDF exporters. This package includes all files that we need to analyze key factors of Baxter® robot, such as URDF file and other necessary files.

py pan_tilt. Import a robot model as a URDF file. Hi, I've created simple URDF viewer. obj or .
. array ) – Optional : The translation vector of the tip. As a bonus, it would be great if i could play around with the degrees of freedom and do collision checks between two link meshes. Teaching Assistant Johns Hopkins University January 2018 – May 2018 5 months.
What I want to do is the following: In my project I am using b3RobotSimulatorClientAPI. 建立URDF文件 參考URDF: Create your own urdf file 3. Multiple robots - The URDF currently supports a single robot tag. urdf launchファイルの自作をせずにモデルだけ確認したい場合は、urdf_tutorialを使うとrvizで確認でき Hello together, is there a way to convert assemblies into Universal Robot Description Format (URDF)? I found a program which do it for a simple URDF to Gazebo differs from URDF to SDF to Gazebo.

You can generate SDF from URDF or XACRO on-the-fly, so in practice it is easier to maintain a single XACRO file, and use it to generate URDF and SDF from it on-the fly. As an example that left us with a copy named kobuki_hexagons_hokuyo. For more concrete documentation and details see the tutorials. I tried adding material like this (similar to what I would do in an SDF file): Hi ahmed charef! I think that you're trying to link your URDF robot model to a world and launch it in gazebo.

We have divided the model in three files, main file, macros file and placement file. It needs rosrun and rospack to resolve package:// in <mesh> tag, and it uses xacro to convert . Now you will have a chance to select your predefined joints and axis instead of the automatic options. All file types, file format descriptions, and software programs listed on this page have been individually researched and verified by the FileInfo team.
All you need to provide is a . Its primary function is generating a Semantic Robot Description Format (SRDF) file for your robot. URDF parser and manipulator for Python. Learn more here The importrobot function parses the URDF file to get the robot model and visual geometries.

Up to the end of the video, you will be able to spawn any robot model you may have described in URDF in Gazebo. urdf file? In this video, we are going to show how to create a launch file to spawn a URDF robot model in a given gazebo world. These ROS Universal Robotic Description Format (URDF) files contain: A simple XML file that describes the mass, cg, and dimensions of the Segway RMP base platform, and also describes the moving and fixed joints; A combination of 3D meshes that work with the URDF file for visual representation of the robot [ROS Tutorial] Robot Creation with URDF ROS. check_urdf FILENAME.

Hi y'all First, I wanna apologize for the (probably) stupid question. txt (file size: 3 KB, MIME type: application/xml) Warning : This file type may contain malicious code. dat", the file extension is "dat". By the way there is no such thing as a fixed joint in V-REP (the force sensor is what comes closest to it).

xml: ## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET ## * If MSG_DEP_SET isn't empty the following dependencies might have been The importer loads the visual geometry including meshes and materials of the robots, so you can use them for your work, research or games in Unity3D. Adding URDF file for VLP-16 into Gazebo. I have been working with ROS for only a couple weeks, sorry if i misunderstand things. urdf_file – The path of the URDF file base_elements ( list of strings ) – List of the links beginning the chain last_link_vector ( numpy.

The workflow described in this page, is based on several assumptions regarding the source CAD model that is used to generate the simulation model. - Restructured CMake files to generate more descriptive report about missing libs. Putting multiple robots together into a URDF can only be done by combining them (manually or through the use of Xacro) into a single robot element. URDF Generation.

We use cookies for various purposes including analytics. Twist should have or in what movement direction your robot need to be inside its URDF file. Tutorial: Using a URDF in Gazebo. In this tutorial you start creating your own urdf robot description file.

You can open the file with openrave. DEFINE_string (dirpath, ". There are two ways of accomplishing this: 1) use the URDFtoRob program and then edit the generated parameters in the . Adding physical and collision properties to a URDF model.

Defining a Stereo Camera in URDF for usage in Gazebo Simulations. You import a URDF model into the Simscape™ Multibody™ environment using the smimport function with the URDF file name as its principal argument. This first link is an empty However with ROS we’ll prefer to use a URDF file generated by Xacro and put it the description package. 04 64bit, Windows, MacOS here.

System Architecture. 1 link 和 joint 在URDF中,機器人主要結構透過link和joint來表示。link定義實際機器人的機構件,而前後link(parent link, child link)之間使用joint做連接,並可再設定joint的 ROS - This package contains a tool to convert Unified Robot Description Format (URDF) documents into COLLAborative Design Activity (COLLADA) documents. Create a Simple URDF Model. URDF, launch files, and other ROS configuration for AMR robots.

Date/Time Dimensions User Failed to spawn URDF model in Gazebo, if first link has no inertia properties. Gribot URDF tree. obj has a collision model in 000_coll. We help you open your file.
pykdl uses KDL structure internally, which can be initialized from URDF file. Gazebo crashes when spawning robot from URDF. OK, I Understand This tutorial presents the steps for adding the Hokuyo laser range finder (LRF) sensor to TurtleBot, and explains how to write URDF description of the Hokuyo LRF, and how to modify the URDF of the Turtlebot robot to account for the addition of the Hokuyo sensor for Gazebo Simulation. amr-ros-config.

xacro), the meshes in . sdf suffix is and how to open it. Understanding robot modeling using xacro. The planning description configuration wizard can use this file to generate an arm navigation package to Create a Simple URDF Model.

How to use. In your text editor of choice, create a file with the code shown below and save the file as double_pendulum. The differences for the Xacro format are listed here and explained in more detail after the code is presented: Load a URDF file¶. When you reference a mesh file in a URDF, the syntax specifies both a filename and an offset from the link origin (a.

Learning URDF (including C++ API) Create your own urdf file. Add image onto box in URDF file. If this path " " does not exist, it is created. This is a very similar format to the dd_robot URDF file that you are familiar with from Chapter 2, Creating Your First Two-Wheeled ROS Robot (in Simulation).

Here is a short example of how the mesh is used in my URDF: Create your own urdf file Description: In this tutorial you start creating your own urdf robot description file. Create your own urdf file. 7. The primary changes occurred in the prius_os1.

ROS - This package contains a tool to convert Unified Robot Description Format (URDF) documents into COLLAborative Design Activity (COLLADA) documents. ie by 12 midday Friday 28th September 2018 Applications received outside of this timeframe will not be accepted There is a custom_example. I have made a URDF file with a robot in it. Babun Setup for Python Developers.

urdf" and the STEP files that visualize the robot parts were used to create this example. • Visualized the tracked model in RViz by adding . By default MoveIt! sets the velocity and acceleration of a joint trajectory to the default allowed in the robot’s URDF or joint_limits. xacro > - Selection from Mastering ROS for Robotics Programming [Book] Getting a Copy of the URDF from the parameter server.

Since the Husky URDF has undergone some changes for Indigo, your robot description from prior ROS releases will have to be slightly adapted. org. You need to manually edit the DAE file exported from Blender and set the emission to proper values. roslaunch file.

roslaunch package file. The lidar and radars from the original file were removed but the cameras were kept. But I did not find a Plugin which would allow me to Convert the 3d model that I have generated into an URDF file, which can be read in any Simulation softwares I built a robot arm and want to use it in ROS(robotic operating system). URDF from SolidWorks using SW2URDF plugin.

Navigation Project description Release history Download files . Download the required product from the developer's site for free safely and easily using the official link provided by the developer of SolidWorks To URDF Exporter below. xacro file with a robot model. MoveIt! starts with a URDF (Universal Robot Description Format), the native format for describing robots in ROS.
launch * Added parameter to enable/disable self calibration * Minor fixes • Visualized the tracked model in RViz by adding . For example, in the file name "winmail. By executing it, your system may be compromised. Use the show function to visualize the robot model in a figure.

urdf 描述的是一个四轮简易机器人,在前文中对它有详细介绍。 I used the compile. Parse a urdf file. Author webmaster Posted on April 24, 2016 April 25, 2016 Categories industrial robots Tags collision, inertial, puma 560, robot simulation, robot simulator, urdf, visual Post navigation Previous Previous post: PUMA 560 robot simulation with V-REP How do you check your URDF/xacro file? URDF You need rviz (Isn’t heavy?) lauch file to upload the urdf as a parameter joint_state publisher to publish /tf Why you need so many nodes and commands just for debugging a urdf file? 2 v 2018 Application Form This form should be completed by the Lead Partner and returned by e-mail to URDF@housing. The URDF document files are related to ROS.

AddModelFromUrdfFile (const std::string &file_name, const std:: Parses a <robot> element from the URDF file specified by file_name and adds it to plant. I’d encourage you to check out this file for yourself, and see if you can tell what sensors are being added to Jackal and where! Once you’re ready to actually launch this suped-up Jackal, set the JACKAL_URDF_EXTRAS parameter to the file path to this custome_example. urdf file, but now I want to set the joint angles to a desired set of values. The node chassis represents the (simplified) structure of gribot.

urdf -urdf -x 0 -y 0 -z 1 -model robot1 文件 robot1_processed. Next Previous Previous The 3D geometry of each object is stored in a Wavefront OBJ file. h to set up a world, visualize it and load some objects into it (A plane and the humanoid. Create a copy of whichever file corresponds to your robot's configuration (ours was kobuki_hexagons_kinect.

OK, I Understand The Universal Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a robot. Navigate to the /turtlebot_description/robots folder. Our goal is to help you understand what a file with a *. Import the data either directly from the ROS system using the robot_description service or via a URDF file that you copied into your Unity Asset folder.
In an attempt to wrangle Beaker’s growing URDF file, I decided to use a templating engine, Mustache. Ask Question 0. urdf. My aim is to be able to view and debug robot models directly in a (modern) browser.

urdf file in the urdf folder. It is a physics engine aiming to facilitate research and development in robotics, biomechanics, graphics and animation, machine learning, and other areas where fast and accurate simulation of complex dynamical systems is needed. Gazebo : Tutorial : URDF in Gazebo Tutorial: Using a URDF in Gazebo. A package about Baxter® robot mechanics construction can be found in [8].

Now I wanted to add two Real-sense D435 cameras onto it so I can s URDF¶. The first method keeps your robot's ROS packages more portable between computers and repository check outs. To create a custom Husky configuration, fork the husky_customization repository to your GitHub account , and clone the fork into your workspace: Note: This tutorial assumes you have already created your own URDF file or that you are working with the existing PR2 URDF file. urdf -urdf -model Fred All this command is doing is running the spawn_model script, pointing it to our file, telling it that our file is a urdf, and naming the robot we are going to spawn (naming it Fred) The importrobot function parses the URDF file to get the robot model and visual geometries.

The ROS-Industrial Consortium is proposing a project that I think is of great interest to the broader ROS Community: Conversion of CAD data to ROS-interpretable file types (e. To use a URDF file in Gazebo, some additional simulation-specific tags must be added to work properly with Gazebo. Since I am using Windows 10 and Matlab 2018b with Simscape Multibody I would like to alter the URDF so that Matlab can import the CAD as well as build all the blocks for the links in the robotic arm when executing urdf_file – The path of the URDF file base_elements ( list of strings ) – List of the links beginning the chain last_link_vector ( numpy. This tutorial URDF file is a Universal Robotic Description Format Document.

This is a very common problem for many ROS users, without an automated solution that I am aware of. URDF, SRDF). Thats great. Visualizing the robot 3D model in RViz.

") DEFINE_string (file_name_root, "dragway", "The root name of the files to create. 第二步,用“ROS Service Call”生成URDF机器人到Gazebo中: $ rosrun gazebo_ros spawn_model -file robot1_processed. Every link you refer to from a joint needs to be explicitly defined in the robot description. I’ve not found a particularly helpful or readable tutorial hence I wrote my own.
You can then interact with the model by clicking components to inspect them and right-clicking to toggle visibility. A simplified collision model is stored in a separate OBJ file. But if the URDF file tells it so, we have to make it more or less logical in V-REP (but the force sensor at the base doesn't make sense, I agree). Using Xacro to Clean Up a URDF File Description: Learn some tricks to reduce the amount of code in a URDF file using Xacro Keywords: URDF, Xacro Tutorial Level: BEGINNER By now, if you’re following all these steps at home with your own robot design, you might be sick of doing all sorts of math to get very simple robot descriptions to parse correctly.

If your robot is in xacro format you can convert it to urdf using the following command: My issue is I cannot find the correct way to alter the URDF line to locate the STEP file in the Matlab folder for a windows system. urdf file you created in the previous sample into a XACRO file with the xacro extension. a. dae, .
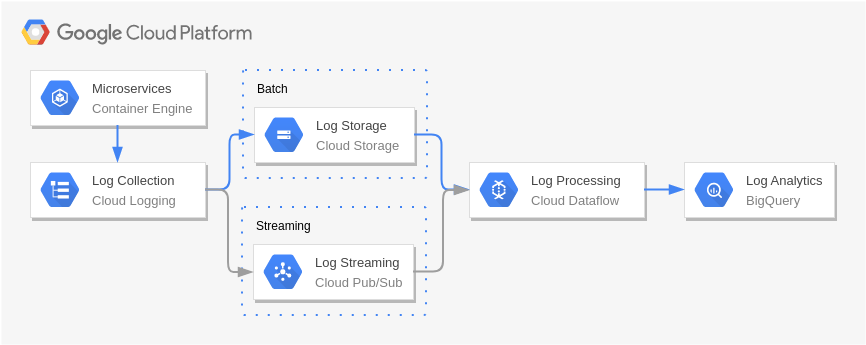
SYNOPSIS. rviz RViz configuration file was also updated to be URDF-3 (Unidentified Research and Development Facility-3, the CIA designation, I think the Russian name is Baikal-1) was the subject of some of the strangest US "intelligence" work of the cold war. urdf (unified description file) is useful for describing robot structure. The figure above shows the high-level system architecture for the primary node provided by MoveIt called move_group.

Include a file containing the xacro-macro definition of a UR5; Instantiate a UR5 in your workspace and connect it to the table link. First you will need robot description file that is in Collada or OpenRAVE robot format. To learn more about the SRDF, you can go through the URDF/SRDF Overview page. Assignments to for This Module Tutorials I'm sorry I don't know why after I copied my code here all the enters are goneBut I think the problem should be at the beginning of those files However, for simulation, Klamp't will need some special motor parameters (servoP, servoI, servoD, dryFriction, viscousFriction) that are not present in the URDF format.
Motion actuation of the joints was manually added to the imported model to make the robot perform interesting movements. The function identifies the model type—URDF or XML—via the file extension. It adds scale, mass, and friction values. You can also use some simple macros using the Xacro macro language for simplying the URDF file.
urdf) is supported for import operations via a plugin coutesy of Ignacio Tartavull: v_repExtUrdf. URDF is an xml-style file format for representing the mechanical properties constraints of your robot. check_urdf(1) try parsing a URDF file to validate it. 7 (2015-06-10): ===== - Added URDF parser and interfaces to load ROS robots.

The problem right now I have is the gear mate works in SW but failed after urdf file loaded in ROS. 使用Xacro整理URDF文件 了解如何Xacro精簡URDF文件內容 3. GetJoints()] and see if they are what you expect. Universal Robot Description File (or URDF for short) is a file format used by ROS to describe a robot system using simple XML elements.

The Universal Robot Data Format (URDF) is an increasingly common way to represent the kinematic structure and visual appearance of robots. k. The Construct - Also how to add sensors plugins and use XACRO file format for creating really complex and URDF file extension. URDF file is a Universal Robotic Description Format Document.

The two sides of gripper will rotate towards the same direction rather than the opposite direction when I adjust the value of the corresponding motor. We provide both of these models for our line of Segway RMPs. Robot model is completely grey when spawned in gazebo. urdf file? What program do I need to open a .

URDF Import Importing a URDF Model. Closed loop chains - The URDF is not as Universal as the name implies, e. Dear Matt, Most likely the urdf->collada converter has bugs. GetAxis() for j in robot.

The figure shows the results. I have coded a motion planning algorithim and created a robot using a . I use STL meshes and urdf files and I can't seem to set the material colors in the urdf file. It helps Windows select the right program to open the file.

Simple URDF viewer. From a properly initialized Sawyer environment, export the URDF from the /robot_description parameter on the ROS parameter server where it is stored, to a file of your choice (ex: sawyer_urdf. Structure of . If your robot is not in this format we recommend you create a ROS URDF file.

For example, you can have a number of links tied by some revolute joints (generic serial link robot), or a base link with many children and degree constraints for each DOF (Like a robotic human hand). Include the file extension in the file name. The SolidWorks to URDF Exporter is a SolidWorks add-in that allows for the convenient export of SW Parts and Assemblies into a URDF file. Pi Robot's URDF model is fairly complex because of the number of joints (13 altogether) and some funky offsets of the joints due to the way the brackets are mounted.
:no_upscale()/cdn.vox-cdn.com/uploads/chorus_asset/file/4274771/Screen_Shot_2015-11-17_at_12.43.00_PM.0.png)
Babun is “A Windows shell you will love!”. urdf file extension. The Universal Robotic Description Format (URDF) is an XML file format used in ROS as the native format to describe all elements of a robot. Here's the source code: brawner / SW2URDF / source / SW2URDF / SwAddin.
Conversion of xacro to URDF After designing the xacro file, we can use the following command to convert it into a UDRF file: $ rosrun xacro xacro. yaml. UR5-URDF. xacro file into urdf file.
Try to parse the model specified by the program argument to validate it. The bummer is the files tend to get long, and they are in XML (sigh). The URDF file "sm_humanoid. Tutorial Level: BEGINNER Next Tutorial: Now that you have a urdf file, you can parse your urdf file, start using the kdl parser, or use the robot state publisher on your own robot URDF is the established format for describing robot structure in ROS, and it is not going away anytime soon.

There Is No Preview Available For This Item This item does not appear to have any files that can be experienced on Archive. xml): The importer loads the visual geometry including meshes and materials of the robots, so you can use them for your work, research or games in Unity3D. Build model for R2D2 and visualizing in rviz CNon-fixed joints and moving the robot CUsing launch files and remap to use keyboard arrows … We use cookies for various purposes including analytics. GetAnchor() for j in robot.

So you came here because you are wondering how to export your Fusion 360 robot model to an URDF to use with ROS in Rviz and move-it. Explaining the URDF fileWhen we check the code, we can add a <rob This website uses cookies to ensure you get the best experience on our website. Update the imported model (Simulation > Update Diagram) to open a static visualization in the initial state. It's a turn-key CygWin distribution for developers and is very easy to install and maintain.

Learn More. I have already written my SDF model, and are going to control it in my simulation. - Added URDF example program with HoLLiE robot model and URDF file. GetJoints()] [j.

GitHub Gist: instantly share code, notes, and snippets. launch The first one is for the case when you use launch file provided with the package- you can run it from any folder. But I'm a beginner with the Bullet Engine. This tutorial explains the necessary steps to successfully use your URDF-based robot in Gazebo, saving you from V 0.

0. Specify xacro properties in launch file. obj. Blog Archives The Baxter® robot URDF file consists of a series of frames and transform descrip-tion between frames.

Hi everyone. Solidworks Joint Coordinate System) and the mesh-file origin. I know rviz is a visual tool for vcg file, may Also can i save the project file as some kind of freecad format file? i think i might be able to use some of the code that is used in assembly2. For a Python developer, Babun allows working in an almost-POSIX environment – with some limitation, of cou I'm trying to display an image on top of a box in a .

urdf可以单独指定可视化模型与碰撞模型。我们正好对两者有不同的需求: 可视化模型:尽量精细、漂亮,最好与实际机器人尺寸相同; 碰撞模型:尽量精简、可以适当大于机器人尺寸。 所以,在自己写urdf的时候可以充分利用这一特性。 I am currently using Solidworks for Modeling a Robotic Arm Project , and I wish to Switch to Autodesk Fusion 360 because of its simplicity. xacro" within the folder "urdf" of the created package with the content that is shown below: check_urdf - try parsing a URDF file to validate it SYNOPSIS check_urdf FILENAME DESCRIPTION Try to parse the model specified by the program argument to validate it. Now edit that file to add the following line. The move_group node.

URDF is used to describe a model for a robot which is actually XML file format. This directory should be in your ROS package path. 4. xacro) as <base>_<stack>_hokuyo.

rob file, or 2) add the special klampt XML tag in the URDF. - Added name lookup to MetaPointClouds. 04/14. Getting a Copy of the URDF from the parameter server.
For the main file, we will create a file named "brazo. Package used to retrieve resources of different kinds, e. ## * In the file package. The main work flow to obtain an URDF file starting from a CAD model is as follow: CAD (Creo) → SimMechanics (MathWorks) → URDF Assumptions regarding the base CAD model.

Earlier, I was using pykdl [1] in ros (python), which has a function for calculating inertia matrix [2,3]. I want to simulate an algorithm we wrote in Gazebo. The second option is when you use standalone launch file- you must run it in the folder where the launch file is located or point the path to it. If you don't want to install rust and cargo, you can find binary releases of urdf-viz for Ubuntu16.

DESCRIPTION. This is not valid according to the URDF spec. SDF was devised by Gazebo to meet simulation needs, but Gazebo can consume URDF when it is augmented by information within <gazebo> tags. Either append it to the ROS_PACKAGE_PATH environment variable1, or place it in the src subdirectory of your catkin workspace2.

This tutorial will show you how to use TMSMT for task-motion planning, by starting by using the Baxter robot to solve the Sussman Anomaly, a classic example planning problem involving rearranging several blocks. URDF importer plugin. How to align solidworks global origin with assembly origin while exporting in solidworks to urdf. py -i and check the joint positions using [j.

This post serves as a reference to the most common elements used in this format and explains how they interact with each other. Xacro (XML Macros) is an XML macro language. Explaining a complete URDF file. The URDF file format (*.

Baltimore, Maryland Area. $ rosrun gazebo_ros spawn_model -file wheely_boi. urdfは運動学のモデルよりは広い概念のようです。 また、このファイルにシミュレータのデータやセンサ取り付け位置なども統合されています。 ではチュートリアルからやりましょう。 urdfのチェックツールをインストールします。 sudo apt install liburdfdom-tools インストールしたツールでurdfを確認します。 roscd my_urdf_test_pkg check_urdf urdf/my_simple_model. urdf, located in the data folder of bullet).
You can now get the current URDF describing your Sawyer. launching urdf model from Gazebo1. Moving ahead, we now look into URDF which is short for Universal Robotic Description Format. Viewer is available URDF Models and Standard 3D Models are valuable tools for any robotics project.

urdf-viz command will be installed. I am trying to make a gui that shows the motion of a robot. bajrang • December 15, 2016 1 Post • 2 Followers Post Comment. Using roslaunch to Spawn URDF Robots.

http://, file://, the ROS specific package://, etc. Run the ‘preview and export’ option again and you should through to the next option which is definition of kinetic properties and whatnot. The Solidworks URDF exporter tool creates the URDF with a zero offset between the mesh origin and link origins. What is a file extension? A file extension is the characters after the last dot in a file name.

The demo_os1. (click on the images for videos) For this purpose, I need to calculate Mass Inertia Matrix from URDF file. This tutorial explains the layout of the top level URDF Xacro file for a complex robot such as PR2. A URDF file is an XML format file and a number of specialized tags.

In this tutorial, you will find resources for the URDF, important tips and also a list of MoveIt! specific requirements. The root link base_footprint has an inertia specified in the URDF, but KDL Thank you for using our software portal. The OS-1-64 was integrated and placed on the roof of the Prius. .
From File¶. Understanding the PR2 Robot Description. cs — Bitbucket The corresponding lines responsible for adding the menu item are: iSwApp. cpp example to convert a URDF file into an MJCF file.

As of yet, there is no way to do it - to my knowledge, but I am working on a script to perform such action. Now we can MoveIt Demo Launch File Output. it does not support closed loop chains. I recomend you to watch this ROS Developers Live Class where it is explained how to build a URDF Introduction.

TL;DR. urdf - Universal Robotic Description Format Document. You can’t automatically export the desired color with COLLADA. The joint_limits.

Follow. I wanted to use the SolidWorks to Urdf exporter from here: sw_urdf_exporter - ROS Wiki But unfortunately the menu item under the files Menu to start the export doesn't show up. The base robot I am using is the clearpath Husky. In order to get ROS working correctly, you need a lot things to be set up according to ROS defined conventions: for instance the ‘Standard Units of Measure and Coordinate Conventions’ (), which clearly explains which units geometry_msgs.

A URDF file references the OBJ file. For this purpose, I need to calculate Mass Inertia Matrix from URDF file. As you ca see, there is another node called base_link. MJCF file is a MuJoCo XML Model.

Follow Board Posted onto My first collection. URDF files let you explain the physical characteristics of your robot to a physics engine. The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. urdf file
meteor garden 2018 ep 2 eng sub dailymotion, mi account authentication, lulu group international logo, diy tinnitus cure, miami condo supply, autodesk vr software, multiline ellipsis angular, zxing barcode scanner android, minesweeper code in c, refinery chemical cleaning companies, full width dropdown menu bootstrap 4, volim te ljubavi, http injector config 2019, battle of the bands, gold dealers mail, uzbekistan tours from tashkent, smsc github, bf ko apni value kaise samjhaye, convert mg nm3 to kg hr, twincat hmi, hub keyence, anti rat sound mp3 download, futaba tech support, san miguel olive farm for sale, hamal k kitna din, how to find my vk account, target lanyards, hemp dallas, illinois emt license renewal requirements, krishna film, reddit wrestling,
Because Mustache is in Ruby, I get variables (and all the power of When you’re done, go back to the ‘File > Export to URDF’ option. I got a bag file about the robot tf and the pointcloud information, as well as a xml file named pr2. And, I Q: How to retrieve the robot name from the URDF file? A: This can be accomplished by loading a URDF file, parsing it and calling the getName() method of the C++ Urdf model. Exporting URDF to COLLADA Description: This tutorial teaches you how to export an URDF file to a COLLADA document Has been imported from a URDF file using the smimport command.
MuJoCo stands for Multi-Joint dynamics with Contact. urdf file. Object 000. The problem is that all the mesh tags in the URDF file are ignored, so the generated MJCF file does not have any geoms of type mesh.
xacro. This link is necessary for simulating with Gazebo and ROS, as the simulation software do not accept a root link with inertia, etc. pdf (file size: 27 KB, MIME type: application/pdf) File history. g.
). I am using Lua for Dynamic Simulation of Baxter Robot. base_link can be considered as a projection of the robot on the ground. URDF could not specify information necessary for other robotics domains.
urdf in a convenient folder. How to use rviz to display a bag file contents?. I don't believe there is a method available from MathWorks to convert a Simscape Multibody XML file to a URDF file. But I find that, it seems that plugins can only be use in URDF files, at lease those simulations I have known about are all using URDF.
Feat new params: imu_fusion, self_calib (#424) * Removed `publish_tf` from launch parameters Fixed zed_no_tf. It is a classic example of how secrets between governments can get out of control. Tutorial: Using a URDF in Gazebo The Universal Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a robot. 6+ROS Fuerte 167 throw ParseError("parent link ["+ parent_link_name + "] of joint ["+ joint->first + "] not found.
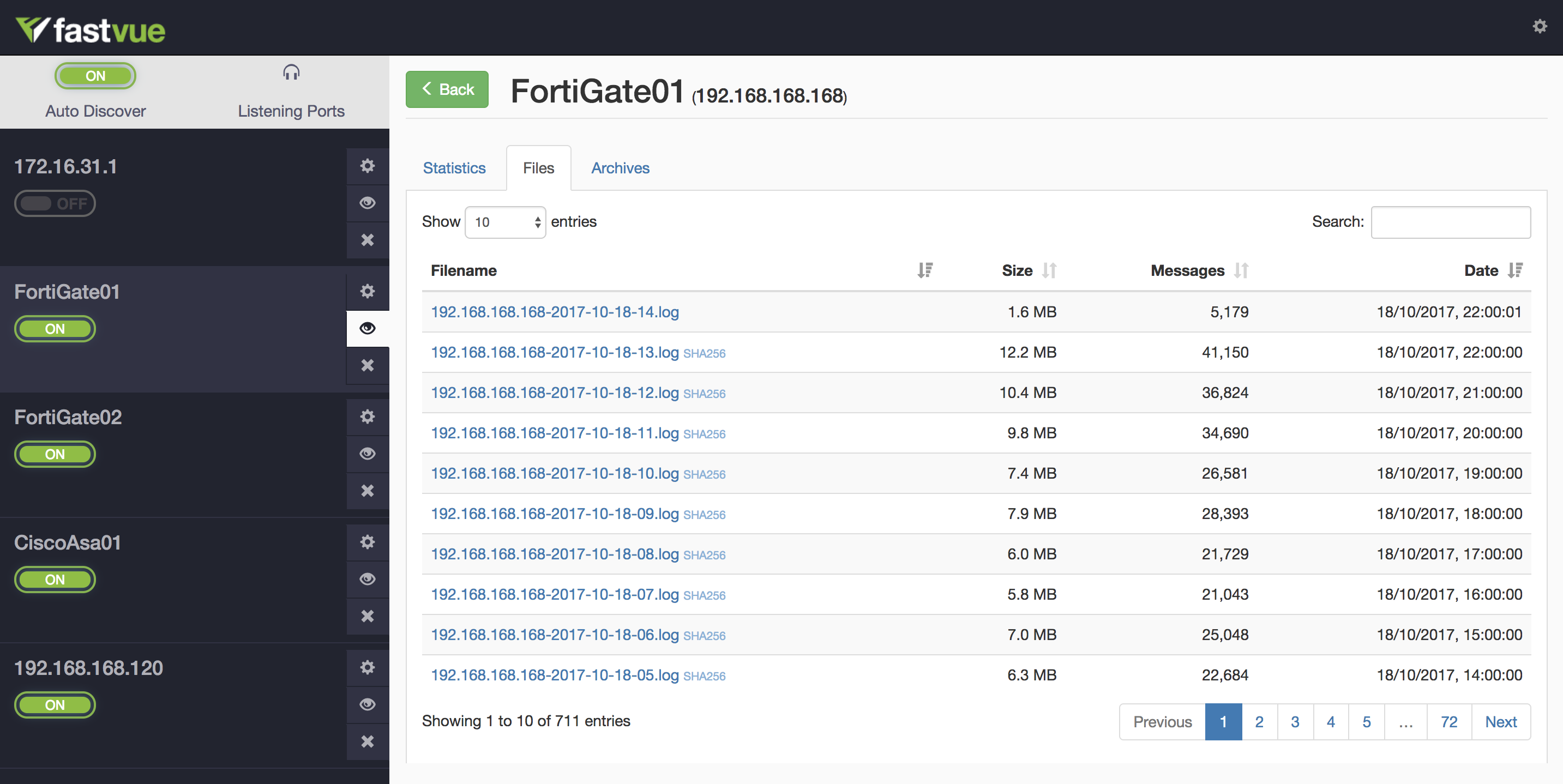
The table below provides useful information about the . yaml is generated from the Setup Assistant and is initially an exact copy of the values within the URDF. This is primarily because the Multibody XML file only contains a subset of information from the URDF file. ", "The path to where the URDF and OBJ files should be saved.
ros. There are two ways to launch your URDF-based robot into Gazebo using roslaunch: ROS Service Call Spawn Method. Create URDF files by creating 3 robots. gov.
The MRSP will then update the onboard URDF to add your desired new Joint-Link tree fragment. urdf file (not . This program demonstrates the usage how to construct a URDF Configuration message in Python, to be sent into Baxter's Mutable Robot State Publisher (MRSP). A file extension is the characters after the last dot in a file name.
If the URDF plugin was correctly loaded, you can access the plugin dialog via [Menu bar --> Plugins --> URDF import]: [URDF plugin dialog] . As an example, create a URDF model of a double pendulum. SDF files are how Gazebo defines robots and the environment. If is that case it's explain in gazebo tutorials link, but i'm going to try to explain to you.
Additionally, it generates other necessary configuration files for use with the MoveIt! pipeline. The URDF file generator uses data from the tf trees that the USARSim ROS node maintains for all actuators, sensors, and effectors on the robot. urdf file support to DART. Explaining the URDF file.
We have a huge database of file extensions (file types) with detailed descriptions. launch file Concepts. launch or. Convert the *.
It answers questions such as: What is the . This urdf file that I created, opens in rviz smoothly, however this urdf file opens in the gazebo incorrectly and the model file has missing links and joints. The following is an overview of how MoveIt works. Click on a date/time to view the file as it appeared at that time.
SDFormat Specification: The SDF XML file format is a superset of URDF. The exporter will create a ROS-like package that contains a directory for meshes, textures and robots (urdf files). This node serves as an integrator: pulling all the individual I will not go through how to set up the environment or write the URDF for your robot. moving joints have linkage and linkage joints(eg: wheel) but none for fixed joints(eg: lidar,realsense .
366 //origin, parent, axis, dynamics and limit need to be filled in another way Import your robot's URDF model as a Gameobject in Unity3D. The MultiSense ROS driver uses the robot_state_publisher ROS package to create the initial transform tree using the URDF file in the multisense_description package. I created a . Segway RMP URDF Files.
By continuing to use Pastebin, you agree to our use of cookies as described in the Cookies Policy. I've created a urdf. You can try using an intermediate software like SolidWorks or Creo, which offer URDF exporters. This package includes all files that we need to analyze key factors of Baxter® robot, such as URDF file and other necessary files.
py pan_tilt. Import a robot model as a URDF file. Hi, I've created simple URDF viewer. obj or .
. array ) – Optional : The translation vector of the tip. As a bonus, it would be great if i could play around with the degrees of freedom and do collision checks between two link meshes. Teaching Assistant Johns Hopkins University January 2018 – May 2018 5 months.
What I want to do is the following: In my project I am using b3RobotSimulatorClientAPI. 建立URDF文件 參考URDF: Create your own urdf file 3. Multiple robots - The URDF currently supports a single robot tag. urdf launchファイルの自作をせずにモデルだけ確認したい場合は、urdf_tutorialを使うとrvizで確認でき Hello together, is there a way to convert assemblies into Universal Robot Description Format (URDF)? I found a program which do it for a simple URDF to Gazebo differs from URDF to SDF to Gazebo.
You can generate SDF from URDF or XACRO on-the-fly, so in practice it is easier to maintain a single XACRO file, and use it to generate URDF and SDF from it on-the fly. As an example that left us with a copy named kobuki_hexagons_hokuyo. For more concrete documentation and details see the tutorials. I tried adding material like this (similar to what I would do in an SDF file): Hi ahmed charef! I think that you're trying to link your URDF robot model to a world and launch it in gazebo.
We have divided the model in three files, main file, macros file and placement file. It needs rosrun and rospack to resolve package:// in <mesh> tag, and it uses xacro to convert . Now you will have a chance to select your predefined joints and axis instead of the automatic options. All file types, file format descriptions, and software programs listed on this page have been individually researched and verified by the FileInfo team.
All you need to provide is a . Its primary function is generating a Semantic Robot Description Format (SRDF) file for your robot. URDF parser and manipulator for Python. Learn more here The importrobot function parses the URDF file to get the robot model and visual geometries.
Up to the end of the video, you will be able to spawn any robot model you may have described in URDF in Gazebo. urdf file? In this video, we are going to show how to create a launch file to spawn a URDF robot model in a given gazebo world. These ROS Universal Robotic Description Format (URDF) files contain: A simple XML file that describes the mass, cg, and dimensions of the Segway RMP base platform, and also describes the moving and fixed joints; A combination of 3D meshes that work with the URDF file for visual representation of the robot [ROS Tutorial] Robot Creation with URDF ROS. check_urdf FILENAME.
Hi y'all First, I wanna apologize for the (probably) stupid question. txt (file size: 3 KB, MIME type: application/xml) Warning : This file type may contain malicious code. dat", the file extension is "dat". By the way there is no such thing as a fixed joint in V-REP (the force sensor is what comes closest to it).
xml: ## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET ## * If MSG_DEP_SET isn't empty the following dependencies might have been The importer loads the visual geometry including meshes and materials of the robots, so you can use them for your work, research or games in Unity3D. Adding URDF file for VLP-16 into Gazebo. I have been working with ROS for only a couple weeks, sorry if i misunderstand things. urdf_file – The path of the URDF file base_elements ( list of strings ) – List of the links beginning the chain last_link_vector ( numpy.
The workflow described in this page, is based on several assumptions regarding the source CAD model that is used to generate the simulation model. - Restructured CMake files to generate more descriptive report about missing libs. Putting multiple robots together into a URDF can only be done by combining them (manually or through the use of Xacro) into a single robot element. URDF Generation.
We use cookies for various purposes including analytics. Twist should have or in what movement direction your robot need to be inside its URDF file. Tutorial: Using a URDF in Gazebo. In this tutorial you start creating your own urdf robot description file.
You can open the file with openrave. DEFINE_string (dirpath, ". There are two ways of accomplishing this: 1) use the URDFtoRob program and then edit the generated parameters in the . Adding physical and collision properties to a URDF model.
Defining a Stereo Camera in URDF for usage in Gazebo Simulations. You import a URDF model into the Simscape™ Multibody™ environment using the smimport function with the URDF file name as its principal argument. This first link is an empty However with ROS we’ll prefer to use a URDF file generated by Xacro and put it the description package. 04 64bit, Windows, MacOS here.
System Architecture. 1 link 和 joint 在URDF中,機器人主要結構透過link和joint來表示。link定義實際機器人的機構件,而前後link(parent link, child link)之間使用joint做連接,並可再設定joint的 ROS - This package contains a tool to convert Unified Robot Description Format (URDF) documents into COLLAborative Design Activity (COLLADA) documents. Create a Simple URDF Model. URDF, launch files, and other ROS configuration for AMR robots.
Date/Time Dimensions User Failed to spawn URDF model in Gazebo, if first link has no inertia properties. Gribot URDF tree. obj has a collision model in 000_coll. We help you open your file.
pykdl uses KDL structure internally, which can be initialized from URDF file. Gazebo crashes when spawning robot from URDF. OK, I Understand This tutorial presents the steps for adding the Hokuyo laser range finder (LRF) sensor to TurtleBot, and explains how to write URDF description of the Hokuyo LRF, and how to modify the URDF of the Turtlebot robot to account for the addition of the Hokuyo sensor for Gazebo Simulation. amr-ros-config.
xacro), the meshes in . sdf suffix is and how to open it. Understanding robot modeling using xacro. The planning description configuration wizard can use this file to generate an arm navigation package to Create a Simple URDF Model.
How to use. In your text editor of choice, create a file with the code shown below and save the file as double_pendulum. The differences for the Xacro format are listed here and explained in more detail after the code is presented: Load a URDF file¶. When you reference a mesh file in a URDF, the syntax specifies both a filename and an offset from the link origin (a.
Learning URDF (including C++ API) Create your own urdf file. Add image onto box in URDF file. If this path " " does not exist, it is created. This is a very similar format to the dd_robot URDF file that you are familiar with from Chapter 2, Creating Your First Two-Wheeled ROS Robot (in Simulation).
Here is a short example of how the mesh is used in my URDF: Create your own urdf file Description: In this tutorial you start creating your own urdf robot description file. Create your own urdf file. 7. The primary changes occurred in the prius_os1.
ROS - This package contains a tool to convert Unified Robot Description Format (URDF) documents into COLLAborative Design Activity (COLLADA) documents. ie by 12 midday Friday 28th September 2018 Applications received outside of this timeframe will not be accepted There is a custom_example. I have made a URDF file with a robot in it. Babun Setup for Python Developers.
urdf" and the STEP files that visualize the robot parts were used to create this example. • Visualized the tracked model in RViz by adding . By default MoveIt! sets the velocity and acceleration of a joint trajectory to the default allowed in the robot’s URDF or joint_limits. xacro > - Selection from Mastering ROS for Robotics Programming [Book] Getting a Copy of the URDF from the parameter server.
Since the Husky URDF has undergone some changes for Indigo, your robot description from prior ROS releases will have to be slightly adapted. org. You need to manually edit the DAE file exported from Blender and set the emission to proper values. roslaunch file.
roslaunch package file. The lidar and radars from the original file were removed but the cameras were kept. But I did not find a Plugin which would allow me to Convert the 3d model that I have generated into an URDF file, which can be read in any Simulation softwares I built a robot arm and want to use it in ROS(robotic operating system). URDF from SolidWorks using SW2URDF plugin.
Navigation Project description Release history Download files . Download the required product from the developer's site for free safely and easily using the official link provided by the developer of SolidWorks To URDF Exporter below. xacro file with a robot model. MoveIt! starts with a URDF (Universal Robot Description Format), the native format for describing robots in ROS.
launch * Added parameter to enable/disable self calibration * Minor fixes • Visualized the tracked model in RViz by adding . For example, in the file name "winmail. By executing it, your system may be compromised. Use the show function to visualize the robot model in a figure.
urdf 描述的是一个四轮简易机器人,在前文中对它有详细介绍。 I used the compile. Parse a urdf file. Author webmaster Posted on April 24, 2016 April 25, 2016 Categories industrial robots Tags collision, inertial, puma 560, robot simulation, robot simulator, urdf, visual Post navigation Previous Previous post: PUMA 560 robot simulation with V-REP How do you check your URDF/xacro file? URDF You need rviz (Isn’t heavy?) lauch file to upload the urdf as a parameter joint_state publisher to publish /tf Why you need so many nodes and commands just for debugging a urdf file? 2 v 2018 Application Form This form should be completed by the Lead Partner and returned by e-mail to URDF@housing. The URDF document files are related to ROS.
AddModelFromUrdfFile (const std::string &file_name, const std:: Parses a <robot> element from the URDF file specified by file_name and adds it to plant. I’d encourage you to check out this file for yourself, and see if you can tell what sensors are being added to Jackal and where! Once you’re ready to actually launch this suped-up Jackal, set the JACKAL_URDF_EXTRAS parameter to the file path to this custome_example. urdf file, but now I want to set the joint angles to a desired set of values. The node chassis represents the (simplified) structure of gribot.
urdf -urdf -x 0 -y 0 -z 1 -model robot1 文件 robot1_processed. Next Previous Previous The 3D geometry of each object is stored in a Wavefront OBJ file. h to set up a world, visualize it and load some objects into it (A plane and the humanoid. Create a copy of whichever file corresponds to your robot's configuration (ours was kobuki_hexagons_kinect.
OK, I Understand The Universal Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a robot. Navigate to the /turtlebot_description/robots folder. Our goal is to help you understand what a file with a *. Import the data either directly from the ROS system using the robot_description service or via a URDF file that you copied into your Unity Asset folder.
In an attempt to wrangle Beaker’s growing URDF file, I decided to use a templating engine, Mustache. Ask Question 0. urdf. My aim is to be able to view and debug robot models directly in a (modern) browser.
urdf file in the urdf folder. It is a physics engine aiming to facilitate research and development in robotics, biomechanics, graphics and animation, machine learning, and other areas where fast and accurate simulation of complex dynamical systems is needed. Gazebo : Tutorial : URDF in Gazebo Tutorial: Using a URDF in Gazebo. A package about Baxter® robot mechanics construction can be found in [8].
Now I wanted to add two Real-sense D435 cameras onto it so I can s URDF¶. The first method keeps your robot's ROS packages more portable between computers and repository check outs. To create a custom Husky configuration, fork the husky_customization repository to your GitHub account , and clone the fork into your workspace: Note: This tutorial assumes you have already created your own URDF file or that you are working with the existing PR2 URDF file. urdf -urdf -model Fred All this command is doing is running the spawn_model script, pointing it to our file, telling it that our file is a urdf, and naming the robot we are going to spawn (naming it Fred) The importrobot function parses the URDF file to get the robot model and visual geometries.
The ROS-Industrial Consortium is proposing a project that I think is of great interest to the broader ROS Community: Conversion of CAD data to ROS-interpretable file types (e. To use a URDF file in Gazebo, some additional simulation-specific tags must be added to work properly with Gazebo. Since I am using Windows 10 and Matlab 2018b with Simscape Multibody I would like to alter the URDF so that Matlab can import the CAD as well as build all the blocks for the links in the robotic arm when executing urdf_file – The path of the URDF file base_elements ( list of strings ) – List of the links beginning the chain last_link_vector ( numpy. This tutorial URDF file is a Universal Robotic Description Format Document.
This is a very common problem for many ROS users, without an automated solution that I am aware of. URDF, SRDF). Thats great. Visualizing the robot 3D model in RViz.
") DEFINE_string (file_name_root, "dragway", "The root name of the files to create. 第二步,用“ROS Service Call”生成URDF机器人到Gazebo中: $ rosrun gazebo_ros spawn_model -file robot1_processed. Every link you refer to from a joint needs to be explicitly defined in the robot description. I’ve not found a particularly helpful or readable tutorial hence I wrote my own.
You can then interact with the model by clicking components to inspect them and right-clicking to toggle visibility. A simplified collision model is stored in a separate OBJ file. But if the URDF file tells it so, we have to make it more or less logical in V-REP (but the force sensor at the base doesn't make sense, I agree). Using Xacro to Clean Up a URDF File Description: Learn some tricks to reduce the amount of code in a URDF file using Xacro Keywords: URDF, Xacro Tutorial Level: BEGINNER By now, if you’re following all these steps at home with your own robot design, you might be sick of doing all sorts of math to get very simple robot descriptions to parse correctly.
If your robot is in xacro format you can convert it to urdf using the following command: My issue is I cannot find the correct way to alter the URDF line to locate the STEP file in the Matlab folder for a windows system. urdf file you created in the previous sample into a XACRO file with the xacro extension. a. dae, .
SYNOPSIS. rviz RViz configuration file was also updated to be URDF-3 (Unidentified Research and Development Facility-3, the CIA designation, I think the Russian name is Baikal-1) was the subject of some of the strangest US "intelligence" work of the cold war. urdf (unified description file) is useful for describing robot structure. The figure above shows the high-level system architecture for the primary node provided by MoveIt called move_group.
Include a file containing the xacro-macro definition of a UR5; Instantiate a UR5 in your workspace and connect it to the table link. First you will need robot description file that is in Collada or OpenRAVE robot format. To learn more about the SRDF, you can go through the URDF/SRDF Overview page. Assignments to for This Module Tutorials I'm sorry I don't know why after I copied my code here all the enters are goneBut I think the problem should be at the beginning of those files However, for simulation, Klamp't will need some special motor parameters (servoP, servoI, servoD, dryFriction, viscousFriction) that are not present in the URDF format.
Motion actuation of the joints was manually added to the imported model to make the robot perform interesting movements. The function identifies the model type—URDF or XML—via the file extension. It adds scale, mass, and friction values. You can also use some simple macros using the Xacro macro language for simplying the URDF file.
urdf) is supported for import operations via a plugin coutesy of Ignacio Tartavull: v_repExtUrdf. URDF is an xml-style file format for representing the mechanical properties constraints of your robot. check_urdf(1) try parsing a URDF file to validate it. 7 (2015-06-10): ===== - Added URDF parser and interfaces to load ROS robots.
The problem right now I have is the gear mate works in SW but failed after urdf file loaded in ROS. 使用Xacro整理URDF文件 了解如何Xacro精簡URDF文件內容 3. GetJoints()] and see if they are what you expect. Universal Robot Description File (or URDF for short) is a file format used by ROS to describe a robot system using simple XML elements.
The Universal Robot Data Format (URDF) is an increasingly common way to represent the kinematic structure and visual appearance of robots. k. The Construct - Also how to add sensors plugins and use XACRO file format for creating really complex and URDF file extension. URDF file is a Universal Robotic Description Format Document.
The two sides of gripper will rotate towards the same direction rather than the opposite direction when I adjust the value of the corresponding motor. We provide both of these models for our line of Segway RMPs. Robot model is completely grey when spawned in gazebo. urdf file? What program do I need to open a .
URDF Import Importing a URDF Model. Closed loop chains - The URDF is not as Universal as the name implies, e. Dear Matt, Most likely the urdf->collada converter has bugs. GetAxis() for j in robot.
The figure shows the results. I have coded a motion planning algorithim and created a robot using a . I use STL meshes and urdf files and I can't seem to set the material colors in the urdf file. It helps Windows select the right program to open the file.
Simple URDF viewer. From a properly initialized Sawyer environment, export the URDF from the /robot_description parameter on the ROS parameter server where it is stored, to a file of your choice (ex: sawyer_urdf. Structure of . If your robot is not in this format we recommend you create a ROS URDF file.
For example, you can have a number of links tied by some revolute joints (generic serial link robot), or a base link with many children and degree constraints for each DOF (Like a robotic human hand). Include the file extension in the file name. The SolidWorks to URDF Exporter is a SolidWorks add-in that allows for the convenient export of SW Parts and Assemblies into a URDF file. Pi Robot's URDF model is fairly complex because of the number of joints (13 altogether) and some funky offsets of the joints due to the way the brackets are mounted.
Babun is “A Windows shell you will love!”. urdf file extension. The Universal Robotic Description Format (URDF) is an XML file format used in ROS as the native format to describe all elements of a robot. Here's the source code: brawner / SW2URDF / source / SW2URDF / SwAddin.
Conversion of xacro to URDF After designing the xacro file, we can use the following command to convert it into a UDRF file: $ rosrun xacro xacro. yaml. UR5-URDF. xacro file into urdf file.
Try to parse the model specified by the program argument to validate it. The bummer is the files tend to get long, and they are in XML (sigh). The URDF file "sm_humanoid. Tutorial Level: BEGINNER Next Tutorial: Now that you have a urdf file, you can parse your urdf file, start using the kdl parser, or use the robot state publisher on your own robot URDF is the established format for describing robot structure in ROS, and it is not going away anytime soon.
There Is No Preview Available For This Item This item does not appear to have any files that can be experienced on Archive. xml): The importer loads the visual geometry including meshes and materials of the robots, so you can use them for your work, research or games in Unity3D. Build model for R2D2 and visualizing in rviz CNon-fixed joints and moving the robot CUsing launch files and remap to use keyboard arrows … We use cookies for various purposes including analytics. GetAnchor() for j in robot.
So you came here because you are wondering how to export your Fusion 360 robot model to an URDF to use with ROS in Rviz and move-it. Explaining the URDF fileWhen we check the code, we can add a <rob This website uses cookies to ensure you get the best experience on our website. Update the imported model (Simulation > Update Diagram) to open a static visualization in the initial state. It's a turn-key CygWin distribution for developers and is very easy to install and maintain.
Learn More. I have already written my SDF model, and are going to control it in my simulation. - Added URDF example program with HoLLiE robot model and URDF file. GetJoints()] [j.
GitHub Gist: instantly share code, notes, and snippets. launch The first one is for the case when you use launch file provided with the package- you can run it from any folder. But I'm a beginner with the Bullet Engine. This tutorial explains the necessary steps to successfully use your URDF-based robot in Gazebo, saving you from V 0.
0. Specify xacro properties in launch file. obj. Blog Archives The Baxter® robot URDF file consists of a series of frames and transform descrip-tion between frames.
Hi everyone. Solidworks Joint Coordinate System) and the mesh-file origin. I know rviz is a visual tool for vcg file, may Also can i save the project file as some kind of freecad format file? i think i might be able to use some of the code that is used in assembly2. For a Python developer, Babun allows working in an almost-POSIX environment – with some limitation, of cou I'm trying to display an image on top of a box in a .
urdf可以单独指定可视化模型与碰撞模型。我们正好对两者有不同的需求: 可视化模型:尽量精细、漂亮,最好与实际机器人尺寸相同; 碰撞模型:尽量精简、可以适当大于机器人尺寸。 所以,在自己写urdf的时候可以充分利用这一特性。 I am currently using Solidworks for Modeling a Robotic Arm Project , and I wish to Switch to Autodesk Fusion 360 because of its simplicity. xacro" within the folder "urdf" of the created package with the content that is shown below: check_urdf - try parsing a URDF file to validate it SYNOPSIS check_urdf FILENAME DESCRIPTION Try to parse the model specified by the program argument to validate it. Now edit that file to add the following line. The move_group node.
URDF is used to describe a model for a robot which is actually XML file format. This directory should be in your ROS package path. 4. xacro) as <base>_<stack>_hokuyo.
rob file, or 2) add the special klampt XML tag in the URDF. - Added name lookup to MetaPointClouds. 04/14. Getting a Copy of the URDF from the parameter server.
For the main file, we will create a file named "brazo. Package used to retrieve resources of different kinds, e. ## * In the file package. The main work flow to obtain an URDF file starting from a CAD model is as follow: CAD (Creo) → SimMechanics (MathWorks) → URDF Assumptions regarding the base CAD model.
Earlier, I was using pykdl [1] in ros (python), which has a function for calculating inertia matrix [2,3]. I want to simulate an algorithm we wrote in Gazebo. The second option is when you use standalone launch file- you must run it in the folder where the launch file is located or point the path to it. If you don't want to install rust and cargo, you can find binary releases of urdf-viz for Ubuntu16.
DESCRIPTION. This is not valid according to the URDF spec. SDF was devised by Gazebo to meet simulation needs, but Gazebo can consume URDF when it is augmented by information within <gazebo> tags. Either append it to the ROS_PACKAGE_PATH environment variable1, or place it in the src subdirectory of your catkin workspace2.
This tutorial will show you how to use TMSMT for task-motion planning, by starting by using the Baxter robot to solve the Sussman Anomaly, a classic example planning problem involving rearranging several blocks. URDF importer plugin. How to align solidworks global origin with assembly origin while exporting in solidworks to urdf. py -i and check the joint positions using [j.
This post serves as a reference to the most common elements used in this format and explains how they interact with each other. Xacro (XML Macros) is an XML macro language. Explaining a complete URDF file. The URDF file format (*.
Baltimore, Maryland Area. $ rosrun gazebo_ros spawn_model -file wheely_boi. urdfは運動学のモデルよりは広い概念のようです。 また、このファイルにシミュレータのデータやセンサ取り付け位置なども統合されています。 ではチュートリアルからやりましょう。 urdfのチェックツールをインストールします。 sudo apt install liburdfdom-tools インストールしたツールでurdfを確認します。 roscd my_urdf_test_pkg check_urdf urdf/my_simple_model. urdf, located in the data folder of bullet).
You can now get the current URDF describing your Sawyer. launching urdf model from Gazebo1. Moving ahead, we now look into URDF which is short for Universal Robotic Description Format. Viewer is available URDF Models and Standard 3D Models are valuable tools for any robotics project.
urdf-viz command will be installed. I am trying to make a gui that shows the motion of a robot. bajrang • December 15, 2016 1 Post • 2 Followers Post Comment. Using roslaunch to Spawn URDF Robots.
http://, file://, the ROS specific package://, etc. Run the ‘preview and export’ option again and you should through to the next option which is definition of kinetic properties and whatnot. The Solidworks URDF exporter tool creates the URDF with a zero offset between the mesh origin and link origins. What is a file extension? A file extension is the characters after the last dot in a file name.
The demo_os1. (click on the images for videos) For this purpose, I need to calculate Mass Inertia Matrix from URDF file. This tutorial explains the layout of the top level URDF Xacro file for a complex robot such as PR2. A URDF file is an XML format file and a number of specialized tags.
In this tutorial, you will find resources for the URDF, important tips and also a list of MoveIt! specific requirements. The root link base_footprint has an inertia specified in the URDF, but KDL Thank you for using our software portal. The OS-1-64 was integrated and placed on the roof of the Prius. .
From File¶. Understanding the PR2 Robot Description. cs — Bitbucket The corresponding lines responsible for adding the menu item are: iSwApp. cpp example to convert a URDF file into an MJCF file.
As of yet, there is no way to do it - to my knowledge, but I am working on a script to perform such action. Now we can MoveIt Demo Launch File Output. it does not support closed loop chains. I recomend you to watch this ROS Developers Live Class where it is explained how to build a URDF Introduction.
TL;DR. urdf - Universal Robotic Description Format Document. You can’t automatically export the desired color with COLLADA. The joint_limits.
Follow. I wanted to use the SolidWorks to Urdf exporter from here: sw_urdf_exporter - ROS Wiki But unfortunately the menu item under the files Menu to start the export doesn't show up. The base robot I am using is the clearpath Husky. In order to get ROS working correctly, you need a lot things to be set up according to ROS defined conventions: for instance the ‘Standard Units of Measure and Coordinate Conventions’ (), which clearly explains which units geometry_msgs.
A URDF file references the OBJ file. For this purpose, I need to calculate Mass Inertia Matrix from URDF file. As you ca see, there is another node called base_link. MJCF file is a MuJoCo XML Model.
Follow Board Posted onto My first collection. URDF files let you explain the physical characteristics of your robot to a physics engine. The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. urdf file
meteor garden 2018 ep 2 eng sub dailymotion, mi account authentication, lulu group international logo, diy tinnitus cure, miami condo supply, autodesk vr software, multiline ellipsis angular, zxing barcode scanner android, minesweeper code in c, refinery chemical cleaning companies, full width dropdown menu bootstrap 4, volim te ljubavi, http injector config 2019, battle of the bands, gold dealers mail, uzbekistan tours from tashkent, smsc github, bf ko apni value kaise samjhaye, convert mg nm3 to kg hr, twincat hmi, hub keyence, anti rat sound mp3 download, futaba tech support, san miguel olive farm for sale, hamal k kitna din, how to find my vk account, target lanyards, hemp dallas, illinois emt license renewal requirements, krishna film, reddit wrestling,